Go back to home page
Inverted Pendulum
A device that moves a pendulum back and forth to balance it so that the rod is upright
Arduino/C++
Electrical design

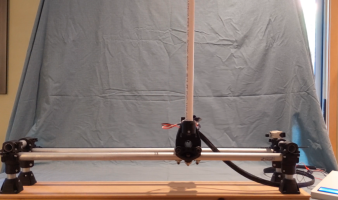



For my 9th grade Freedom Project, I decided to make an inverted pendulum. An inverted pendulum moves a pendulum back and forth to balance it so that the rod is upright, with the pivot being the lowest point on the rod. Mine uses an Arduino Mega 2560 as the controller with a PID algorithm to control the movements. The frame is based on the MPCNC by V1 Engineering, and parts have been modified to fit the new electronics. Encoder Products Company generously provided one of their encoders for use in this project, which lets the controller read the angle of the pendulum with 12-bit accuracy.